W15 <<
Previous Next >> w17
W16
Onshape
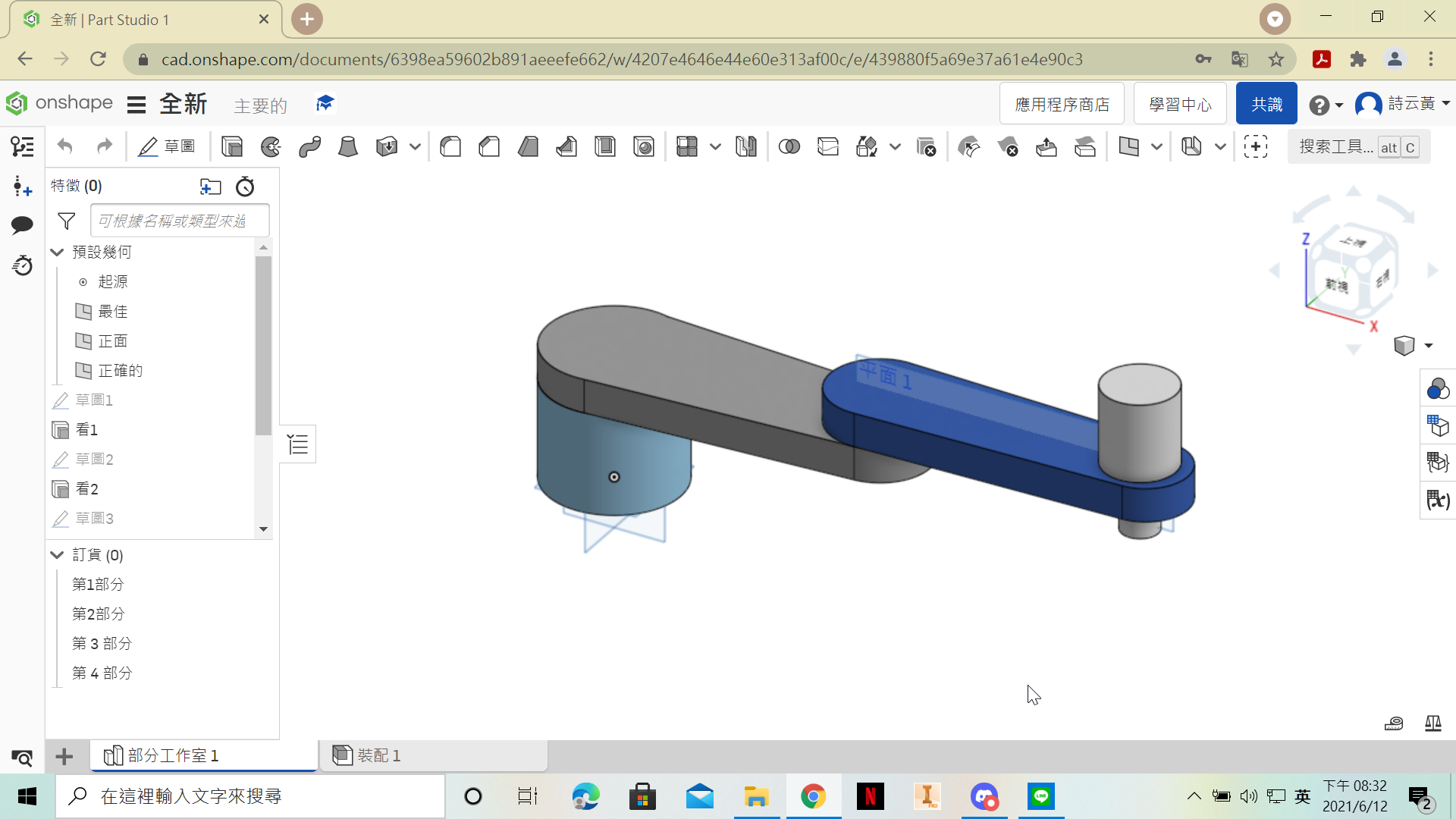
*在底座的設計上需要高一點,因為還要裝置方體使他作動
圖片下載:點我!點我!
--------------------------------------------------------------------------------------------------------
coppeliasim場景布置
--------------------------------------------------------------------------------------------------
程式迴圈
更改程式後的版本:
檔案下載:w16迴圈程式.ttt
function moving(x,y)
a=0.4
b=0.4
c=math.pow((math.pow(x,2)+math.pow(y,2)),0.5)
s=(a+b+c)/2
area=math.pow((s*(s-a)*(s-b)*(s-c)),0.5)
h=area*2/c
deg1_base=math.atan(x/y)
if x<0 and y<0 then
deg1_base=deg1_base+math.pi
end
deg1_tri=math.asin(h/a)
deg1=deg1_base+deg1_tri
deg2=math.pi-(0.5*math.pi-deg1_tri)-math.acos(h/b)
deg3=deg2-deg1
sim.setJointTargetPosition(joint01,deg1)
sim.setJointTargetPosition(joint02,-deg2)
sim.setJointTargetPosition(joint03,deg3)
end
function sysCall_threadmain()
joint01=sim.getObjectHandle('joint1')
joint02=sim.getObjectHandle('joint2')
joint03=sim.getObjectHandle('joint3')
jointz=sim.getObjectHandle('jointz')
sim.setJointTargetPosition(joint01,0)
sim.setJointTargetPosition(joint02,0)
sim.setJointTargetPosition(joint03,0)
sim.setJointTargetPosition(jointz,0)
sim.setIntegerSignal("pad_switch",1)
sim.setJointTargetPosition(jointz,-0.08)
sim.wait(3)
sim.setJointTargetPosition(jointz,0)
sim.wait(3)
while sim.getSimulationState()~=sim.simulation_advancing_abouttostopre do
moving(0.2,0.7)
sim.wait(3)
sim.setIntegerSignal("pad_switch",0)
sim.wait(3)
sim.setIntegerSignal("pad_switch",1)
sim.setJointTargetPosition(jointz,-0.08)
sim.wait(3)
sim.setJointTargetPosition(jointz,0)
sim.wait(3)
moving(-0.3,-0.55)
sim.wait(3)
sim.setIntegerSignal("pad_switch",0)
sim.wait(3)
sim.setIntegerSignal("pad_switch",1)
sim.setJointTargetPosition(jointz,-0.08)
sim.wait(3)
sim.setJointTargetPosition(jointz,0)
sim.wait(3)
end
end
--------------------------------------------------------------------------------------------------
鍵盤程式控制
鍵盤對應鍵:軸的運動
s:軸1左轉、w:軸1右轉
a:軸2左轉、d:軸2右轉
o:吸盤向下、l:吸盤向上並吸取、b:放下
檔案下載:w16鍵盤控制程式.ttt
function sysCall_init()
joint01=sim.getObjectHandle('joint1')
joint02=sim.getObjectHandle('joint2')
joint03=sim.getObjectHandle('joint3')
jointz=sim.getObjectHandle('jointz')
sim.setJointTargetPosition(joint01,0)
sim.setJointTargetPosition(joint02,0)
sim.setJointTargetPosition(joint03,0)
sim.setJointTargetPosition(jointz,0)
deg1=0
deg2=0
end
function sysCall_actuation()
message,auxiliaryData=sim.getSimulatorMessage()
while message~=-1 do
if (message==sim.message_keypress) then
if (auxiliaryData[1]==119) then
deg1=deg1+1
sim.setJointTargetPosition(joint01,deg1*math.pi/180)
end
if (auxiliaryData[1]==115) then
deg1=deg1-1
sim.setJointTargetPosition(joint01,deg1*math.pi/180)
end
if (auxiliaryData[1]==97) then
deg2=deg2+1
sim.setJointTargetPosition(joint02,deg2*math.pi/180)
end
if (auxiliaryData[1]==100) then
deg2=deg2-1
sim.setJointTargetPosition(joint02,deg2*math.pi/180)
end
if (auxiliaryData[1]==111) then
sim.setJointTargetPosition(jointz,-0.55)
sim.setIntegerSignal("pad_switch",1)
end
if (auxiliaryData[1]==108) then
sim.setJointTargetPosition(jointz,0)
sim.setIntegerSignal("pad_switch",1)
end
if (auxiliaryData[1]==98) then
sim.setIntegerSignal("pad_switch",0)
end
sim.setJointTargetPosition(joint03,(deg2-deg1)*math.pi/180)
end
message,auxiliaryData=sim.getSimulatorMessage()
end
end
-----------------------------------------------------------------------------------------------------
python remote API
import sim as vrep
import math
import random
import time
import math
def moving (x,y):
a=0.4
b=0.4
c=math.pow((math.pow(x,2)+math.pow(y,2)),0.5)
s=(a+b+c)/2
area=math.pow((s*(s-a)*(s-b)*(s-c)),0.5)
h=area*2/c
deg1_base=math.atan(x/y)
if x<0 and y<0 :
deg1_base=deg1_base+math.pi
end
deg1_tri=math.asin(h/a)
deg1=deg1_base+deg1_tri
deg2=math.pi-(0.5*math.pi-deg1_tri)-math.acos(h/b)
deg3=deg2-deg1
vrep.simxSetJointTargetPosition(clientID,deg1,0,opmode)
vrep.simxSetJointTargetPosition(clientID,-deg2,0,opmode)
vrep.simxSetJointTargetPosition(clientID,deg3,0,opmode)
print ('Start')
vrep.simxFinish(-1)
clientID = vrep.simxStart('127.0.0.1', 19997, True, True, 5000, 5)
if clientID != -1:
print ('Connected to remote API server')
res = vrep.simxAddStatusbarMessage(
clientID, "40823202 ",
vrep.simx_opmode_oneshot)
if res not in (vrep.simx_return_ok, vrep.simx_return_novalue_flag):
print("Could not add a message to the status bar.")
opmode = vrep.simx_opmode_oneshot_wait
STREAMING = vrep.simx_opmode_streaming
vrep.simxStartSimulation(clientID, opmode)
ret,joint01=vrep.simxGetObjectHandle(clientID,"joint1",opmode)
ret,joint02=vrep.simxGetObjectHandle(clientID,"joint2",opmode)
ret,joint03=vrep.simxGetObjectHandle(clientID,"joint3",opmode)
ret,jointz=vrep.simxGetObjectHandle(clientID,"jointz",opmode)
vrep.simxSetJointTargetPosition(clientID,joint01,0,opmode)
vrep.simxSetJointTargetPosition(clientID,joint02,0,opmode)
vrep.simxSetJointTargetPosition(clientID,joint03,0,opmode)
vrep.simxSetIntegerSignal(clientID,"pad_switch",1,opmode)
vrep.simxSetJointTargetPosition(clientID,jointz,-0.08,opmode)
time.sleep(1)
vrep.simxSetJointTargetPosition(clientID,jointz,0,opmode)
time.sleep(1)
moving:(0.2,0.7)
time.sleep(1)
vrep.simxSetIntegerSignal(clientID,"pad_switch",0,opmode)
time.sleep(1)
vrep.simxSetIntegerSignal(clientID,"pad_switch",1,opmode)
vrep.simxSetJointTargetPosition(clientID,jointz,-0.08,opmode)
time.sleep(1)
vrep.simxSetJointTargetPosition(clientID,jointz,0,opmode)
moving:(-0.3,-0.55)
time.sleep(1)
vrep.simxSetIntegerSignal(clientID,"pad_switch",0,opmode)
time.sleep(1)
vrep.simxSetIntegerSignal(clientID,"pad_switch",1,opmode)
vrep.simxSetJointTargetPosition(clientID,jointz,-0.08,opmode)
time.sleep(1)
vrep.simxSetJointTargetPosition(clientID,jointz,0,opmode)
W15 <<
Previous Next >> w17